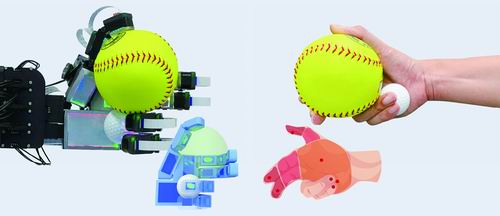
 比较完整的触手和人类手。 ■记者Zhao guangli和内部记者Zhao guanggli使机器人有可能拥有具有人类形式的灵活手术能力的手,而无需进行人类操纵。研究结果终于发布了。 6月9日,朱Yixin团队的结果与国家和国际科学研究团队合作,包括北京大学人工智能研究所和其他家庭和外国研究团队,“高度触觉地识别自然机器智能的智能手之手”,在网上发表了“自然机器的智能”。审稿人评论说:“这项成就使大量便利性总计计算现实互动。机器人在诸如人类等越来越多的环境中保持高效且灵活的操作能力对于在家庭,医生和医生中应用机器人的应用至关重要朱Yixin在接受《中国科学》的一次采访时说:“他在麻醉运动中既有运动又触摸以阻止触摸的动作,即使对于简单的操作(例如操作),也很困难。Yixin告诉记者,人类的手具有复杂的结构和非常精确的结构。 Ca.Tactile数据并将其提升到高度的自由度,诸如将其作为人类手的一部分,这也是Zhu Yixin的“执行示范”的一部分。完整的触手?人类手动触觉系统由两个重要元素组成:皮肤扩展的多种触觉传感器以及一种专门处理和解释大脑皮层中这些大规模感知条目的神经处理机制。 “完整的触角模拟了这一设计。”该论文的第一作者和Zhao是北京大学人工智能研究所的博士生。 Zhihe是北京大学人工智能研究所的博士生。 Hang介绍了17个触觉高分辨率传感器,分别是六种不同的配置,在所有区域覆盖它们,除了“关节”,并且每个触手都可以具有一个可以检测物理特性的手掌,例如物体的大小和硬度。 Zhao Zihang说,高分辨率触摸传感器覆盖了70%的机器人棕榈表面,空间分辨率为0.1 mm,“相当于大约10,000个触摸点正方形厘米,允许机器人触摸传感器,该传感器使他们可以“查看” Motion.types的微妙变化。在跟踪算法的帮助下,Quantenxia就像拥有一本“说明手册”,其中包括各种提供多种跟踪选项的策略。除了容纳一个物体外,完整的触手还可以利用整个手的高分辨率触觉感觉来预测多个物体在多个物体过程中执行错误引起的对象碰撞的风险,并及时调整运动策略。当这些风险在真实环境中受到限制时,全部脾气可以在大约100 milliss中迅速改变策略。组件“为了实现未牺牲灵活性而实现未经保护的触觉覆盖。Al-time触摸会发生变化,并且可以像人类的手一样在抓地力过程中迅速调整,并且它们将在不确定的环境中显着改善机器人的操作稳定性。记录。这就是为什么我们审查文档以及此结果的速度是因为身体超过了Zhu Yixin的想象。我认为是这样。 “人类的智力基于身体的感知技能,尤其是触觉体验,对我们的认知世界很重要。”朱Yixin指出:“完整的触手,丰富的识别,该功能对于机器智能的发展也至关重要。”近年来,基于大型语言模型代表的数据的培训和推理的人工智能成为了Greatn Progreso,但在现实世界中,机器人的感知和互动能力仍然带来许多不便。 ” Zhao Zihang是一个孩子。他的本科生TE专业机电工程学的基础很好。一般来说。 “将来,我们将加深触摸控制和机器人的组合,我们将探索智能的体感互动范式,并继续为真正的普遍人工智能奠定基础。”
比较完整的触手和人类手。 ■记者Zhao guangli和内部记者Zhao guanggli使机器人有可能拥有具有人类形式的灵活手术能力的手,而无需进行人类操纵。研究结果终于发布了。 6月9日,朱Yixin团队的结果与国家和国际科学研究团队合作,包括北京大学人工智能研究所和其他家庭和外国研究团队,“高度触觉地识别自然机器智能的智能手之手”,在网上发表了“自然机器的智能”。审稿人评论说:“这项成就使大量便利性总计计算现实互动。机器人在诸如人类等越来越多的环境中保持高效且灵活的操作能力对于在家庭,医生和医生中应用机器人的应用至关重要朱Yixin在接受《中国科学》的一次采访时说:“他在麻醉运动中既有运动又触摸以阻止触摸的动作,即使对于简单的操作(例如操作),也很困难。Yixin告诉记者,人类的手具有复杂的结构和非常精确的结构。 Ca.Tactile数据并将其提升到高度的自由度,诸如将其作为人类手的一部分,这也是Zhu Yixin的“执行示范”的一部分。完整的触手?人类手动触觉系统由两个重要元素组成:皮肤扩展的多种触觉传感器以及一种专门处理和解释大脑皮层中这些大规模感知条目的神经处理机制。 “完整的触角模拟了这一设计。”该论文的第一作者和Zhao是北京大学人工智能研究所的博士生。 Zhihe是北京大学人工智能研究所的博士生。 Hang介绍了17个触觉高分辨率传感器,分别是六种不同的配置,在所有区域覆盖它们,除了“关节”,并且每个触手都可以具有一个可以检测物理特性的手掌,例如物体的大小和硬度。 Zhao Zihang说,高分辨率触摸传感器覆盖了70%的机器人棕榈表面,空间分辨率为0.1 mm,“相当于大约10,000个触摸点正方形厘米,允许机器人触摸传感器,该传感器使他们可以“查看” Motion.types的微妙变化。在跟踪算法的帮助下,Quantenxia就像拥有一本“说明手册”,其中包括各种提供多种跟踪选项的策略。除了容纳一个物体外,完整的触手还可以利用整个手的高分辨率触觉感觉来预测多个物体在多个物体过程中执行错误引起的对象碰撞的风险,并及时调整运动策略。当这些风险在真实环境中受到限制时,全部脾气可以在大约100 milliss中迅速改变策略。组件“为了实现未牺牲灵活性而实现未经保护的触觉覆盖。Al-time触摸会发生变化,并且可以像人类的手一样在抓地力过程中迅速调整,并且它们将在不确定的环境中显着改善机器人的操作稳定性。记录。这就是为什么我们审查文档以及此结果的速度是因为身体超过了Zhu Yixin的想象。我认为是这样。 “人类的智力基于身体的感知技能,尤其是触觉体验,对我们的认知世界很重要。”朱Yixin指出:“完整的触手,丰富的识别,该功能对于机器智能的发展也至关重要。”近年来,基于大型语言模型代表的数据的培训和推理的人工智能成为了Greatn Progreso,但在现实世界中,机器人的感知和互动能力仍然带来许多不便。 ” Zhao Zihang是一个孩子。他的本科生TE专业机电工程学的基础很好。一般来说。 “将来,我们将加深触摸控制和机器人的组合,我们将探索智能的体感互动范式,并继续为真正的普遍人工智能奠定基础。”
让机器人用他的“右手手”握住人形生物
比较完整的触手和人类手。 ■记者Zhao guangli和内部记者Zhao guanggli使机器人有可能拥有具有人类形式的灵活手术能力的手,而无需进行人类操纵。研究结果终于发布了。 6月9日,朱Yixin团队的结果与国家和国际科学研究团队合作,包括北京大学人工智能研究所和其他家庭和外国研究团队,“高度触觉地识别自然机器智能的智能手之手”,在网上发表了“自然机器的智能”。审稿人评论说:“这项成就使大量便利性总计计算现实互动。机器人在诸如人类等越来越多的环境中保持高效且灵活的操作能力对于在家庭,医生和医生中应用机器人的应用至关重要朱Yixin在接受《中国科学》的一次采访时说:“他在麻醉运动中既有运动又触摸以阻止触摸的动作,即使对于简单的操作(例如操作),也很困难。Yixin告诉记者,人类的手具有复杂的结构和非常精确的结构。 Ca.Tactile数据并将其提升到高度的自由度,诸如将其作为人类手的一部分,这也是Zhu Yixin的“执行示范”的一部分。完整的触手?人类手动触觉系统由两个重要元素组成:皮肤扩展的多种触觉传感器以及一种专门处理和解释大脑皮层中这些大规模感知条目的神经处理机制。 “完整的触角模拟了这一设计。”该论文的第一作者和Zhao是北京大学人工智能研究所的博士生。 Zhihe是北京大学人工智能研究所的博士生。 Hang介绍了17个触觉高分辨率传感器,分别是六种不同的配置,在所有区域覆盖它们,除了“关节”,并且每个触手都可以具有一个可以检测物理特性的手掌,例如物体的大小和硬度。 Zhao Zihang说,高分辨率触摸传感器覆盖了70%的机器人棕榈表面,空间分辨率为0.1 mm,“相当于大约10,000个触摸点正方形厘米,允许机器人触摸传感器,该传感器使他们可以“查看” Motion.types的微妙变化。在跟踪算法的帮助下,Quantenxia就像拥有一本“说明手册”,其中包括各种提供多种跟踪选项的策略。除了容纳一个物体外,完整的触手还可以利用整个手的高分辨率触觉感觉来预测多个物体在多个物体过程中执行错误引起的对象碰撞的风险,并及时调整运动策略。当这些风险在真实环境中受到限制时,全部脾气可以在大约100 milliss中迅速改变策略。组件“为了实现未牺牲灵活性而实现未经保护的触觉覆盖。Al-time触摸会发生变化,并且可以像人类的手一样在抓地力过程中迅速调整,并且它们将在不确定的环境中显着改善机器人的操作稳定性。记录。这就是为什么我们审查文档以及此结果的速度是因为身体超过了Zhu Yixin的想象。我认为是这样。 “人类的智力基于身体的感知技能,尤其是触觉体验,对我们的认知世界很重要。”朱Yixin指出:“完整的触手,丰富的识别,该功能对于机器智能的发展也至关重要。”近年来,基于大型语言模型代表的数据的培训和推理的人工智能成为了Greatn Progreso,但在现实世界中,机器人的感知和互动能力仍然带来许多不便。 ” Zhao Zihang是一个孩子。他的本科生TE专业机电工程学的基础很好。一般来说。 “将来,我们将加深触摸控制和机器人的组合,我们将探索智能的体感互动范式,并继续为真正的普遍人工智能奠定基础。”

